
EtherCAT科普系列(3): EtherCAT技术在伺服驱动器领域的应用
伺服系统是指以位置、速度、转矩为控制量,能够动态跟踪目标变化从而实现自动化控制的系统,主要包括伺服驱动器、伺服电机和编码器,是实现工业自动化精密制造和柔性制造的核心技术。

▲典型伺服系统组成结构图
伺服电机驱动器:运动控制系统的“心脏”
伺服驱动器作为运动控制系统的驱动层和“心脏”,一般通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。
驱动器接收控制信号并将其转化为能够运行电机的电流、电压信号,进而驱动电机(执行层)运转,带动工作机械运行,最终实现机械运动高速、高精度的位移(角度)、速度、力矩控制。

▲典型伺服驱动器工作机制图
目前伺服驱动系统已广泛应用于工业自动化生产中,比如机械手、CNC 数控机床、工业机器人等领域,已经成为工业自动化的重要支撑技术之一。根据格物致胜数据,2023年我国工业自动化市场规模约为2601亿元。其中伺服系统市场规模超过203亿元,到2026年将达到216亿元。
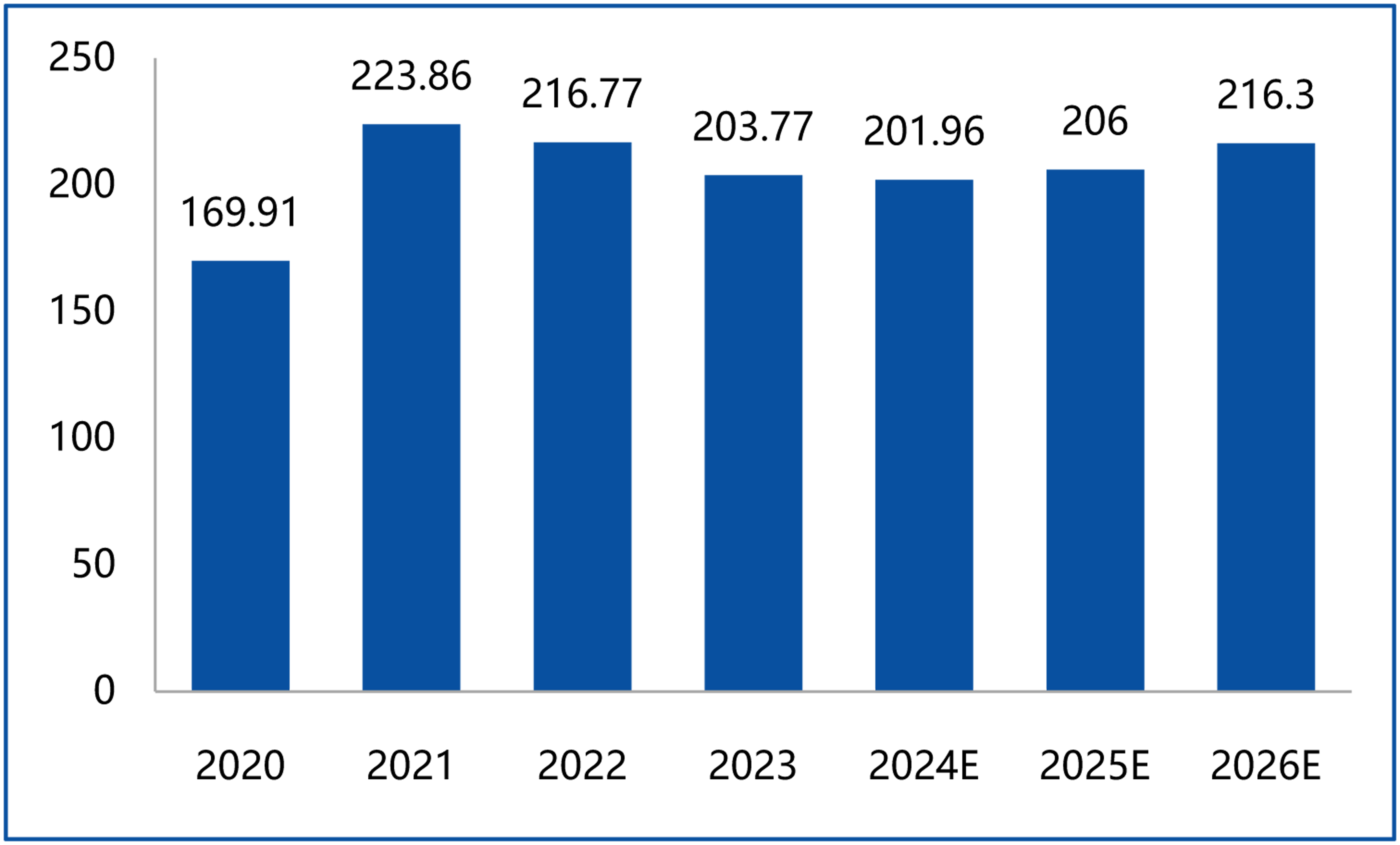
▲ 2020-2026E中国伺服系统市场规模及发展趋势(数据来源:格物致胜)
基于EtherCAT的伺服驱动系统

随着工业4.0和中国制造2025概念的陆续提出,工业自动化领域的伺服驱动系统趋于网络化和智能化,大多数伺服驱动系统都采用了总线通信方式,实现复杂的运动控制功能。
传统的伺服驱动系统由于缺乏网络通信功能、开放性不强、扩展性差、系统兼容性差等条件的限制,已很难满足现代制造业的发展需求。近年来,随着工业以太网EtherCAT技术快速发展,EtherCAT技术被广泛应用于各种复杂的控制系统中,构成网络化实时运动控制系统结构,并具备良好的网络结构和人机交互功能,已成为伺服驱动领域发展的主流。
基于 EtherCAT伺服运动控制使得网络伺服运动控制系统实时性更高(100个伺服轴的通讯仅需100us 就可为所有轴所需的参数,同时还能报告其状态参数),拓扑结构更加灵活,可扩展性更好,安全性更高;同时有利于企业生产系统网络与管理系统网络的结合,提高现代制造的管理水平,改造升级现代制造业;通过充分使用丰富的PC硬/软件资源和低成本且可共享的网络资源,有助于降低网络运动控制系统成本。EtherCAT技术具有带宽利用率高、兼容性好、可靠性高、抗干扰性强、拓扑灵活等优势特点,使其在工控界迅速普及,各家厂商纷纷推出了基于EtherCAT技术的伺服产品。
EtherCAT技术在伺服驱动控制领域的应用优势包括:
1)节点与节点之间只要网线连接,系统电气柜配线非常方便;
2)系统抗干扰能力强,网口是隔离的,整个弱电控制板的EMC特性好;
3)EtherCAT 初始化完成就可以直接读取所有从站轴的编码器位置;
4)SDO可以在线读取与修改各轴的参数与增益,轴参数调试更方便;
5)可以选择不同的 PDO数据内容,实现位置转矩速度控制,CSP(周期位置)ICSV(周期速度)/CST(周期转矩)可以自由切换;
6)方便上位机远程诊断和维护电气系统,预测性维护也更方便。
基于EtherCAT实时通信的伺服电机驱动控制系统主要由以下几部分组成:工控机、伺服驱动器、EtherCAT总线、编码器、伺服电机。
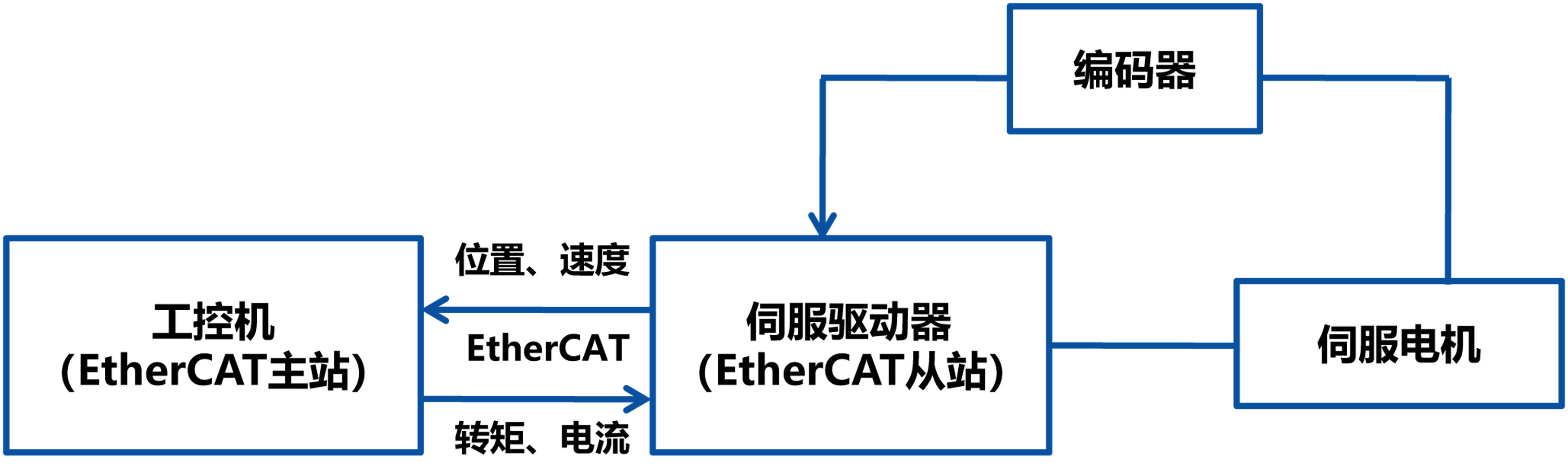
▲典型EtherCAT伺服驱动系统结构图
1)工控机配置为基于PC机的EtherCAT 主站,周期性接受从站上传位置、速度等参数,并做相应的闭环运算,然后下发参考电流或转矩给从站;
2)伺服驱动器作为EtherCAT从站,接受编码器所采集的电机参数,然后与主站进行数据交互,将相应数据由EtherCAT总线周期性传给主站,并接受主站下发数据和控制命令,并驱动伺服电机;
3)EtherCAT总线将工控机与伺服驱动器连接起来,作为主从站数据通信通道,使用100BASE-TX的5类双绞网线等为其传输介质;
4)编码器周期快速采集电机位置、速度参数,并反馈给伺服驱动器,以便主站读取;
5)伺服电机采用矢量控制等方式,由其伺服驱动器实现控制,以带动相应轴系运转。
整个EtherCAT伺服电机驱动控制系统的重点在于EtherCAT主从站的实现:主站采用基于PC的方式实施,由工控机配置实现相应功能;从站直接采用EtherCAT伺服驱动器,已包含从站处理硬件,可通过相关配置实现从站通信和电机驱动功能。
基于EtherCAT的多轴伺服驱动器从站硬件构架的主要组成部分包括网络通信接口、EEPROM 存储电路、EtherCAT从站控制器、主控微处理器及外围电路等。
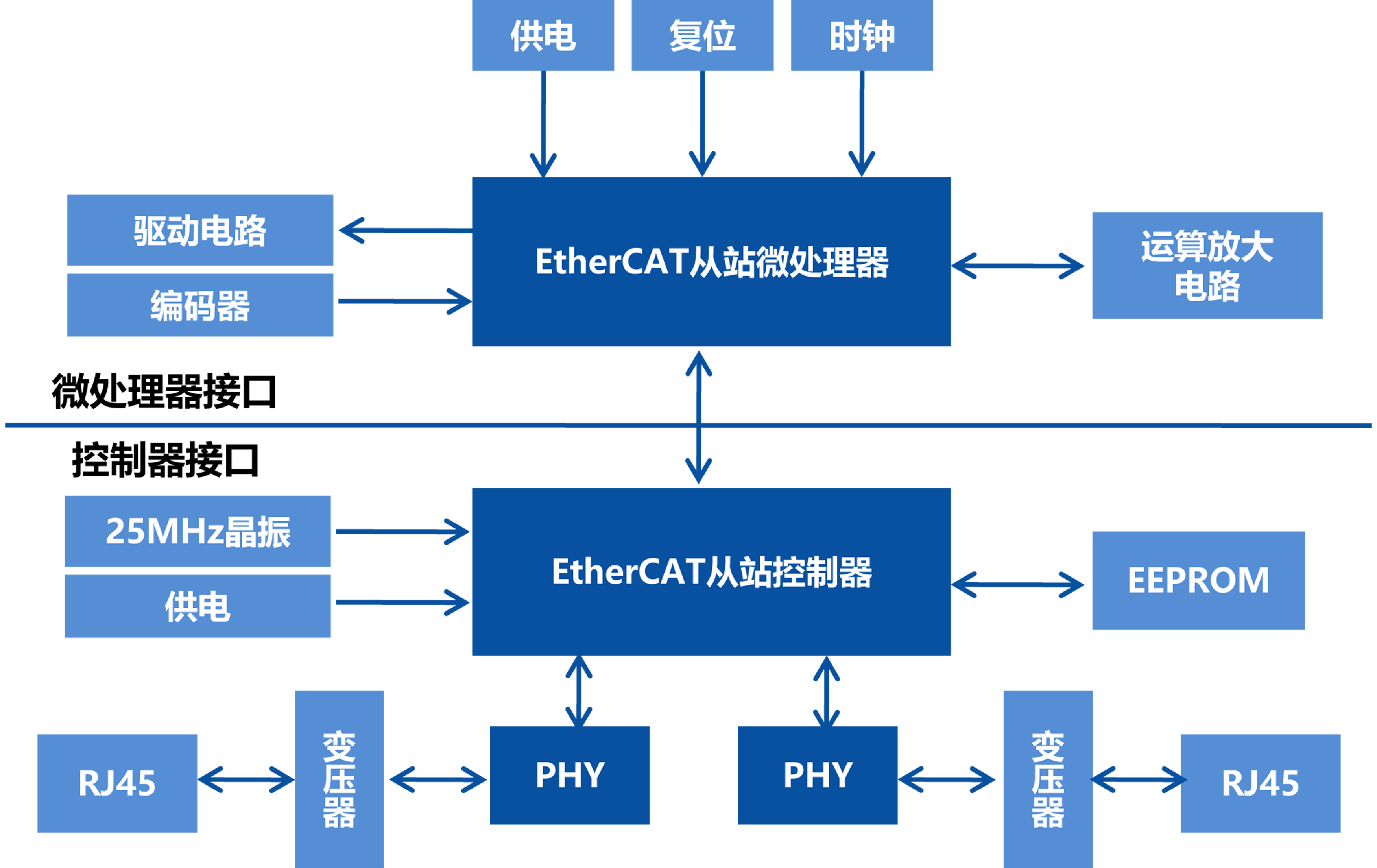
▲典型EtherCAT伺服驱动器结构图
EtherCAT从站控制器用于实现EtherCAT协议的实现以及数据帧的处理工作,是整个从站实现EtherCAT通信的核心。EtherCAT伺服从站控制器有3个主要接口,通过 RJ45 与主站或者是其他从站相连,构成不同的拓扑结构,也是通过网线进行数据传输的硬件接口;通过EEPROM存储从站设备文件信息,主站从中读取从站信息,识别并设置从站;通过 PDI(物理数据接口)与微处理器进行数据交换。
码灵半导体EtherCAT伺服驱动器解决方案
码灵半导体CF1106系列芯片在EtherCAT伺服驱动器中的应用优势:
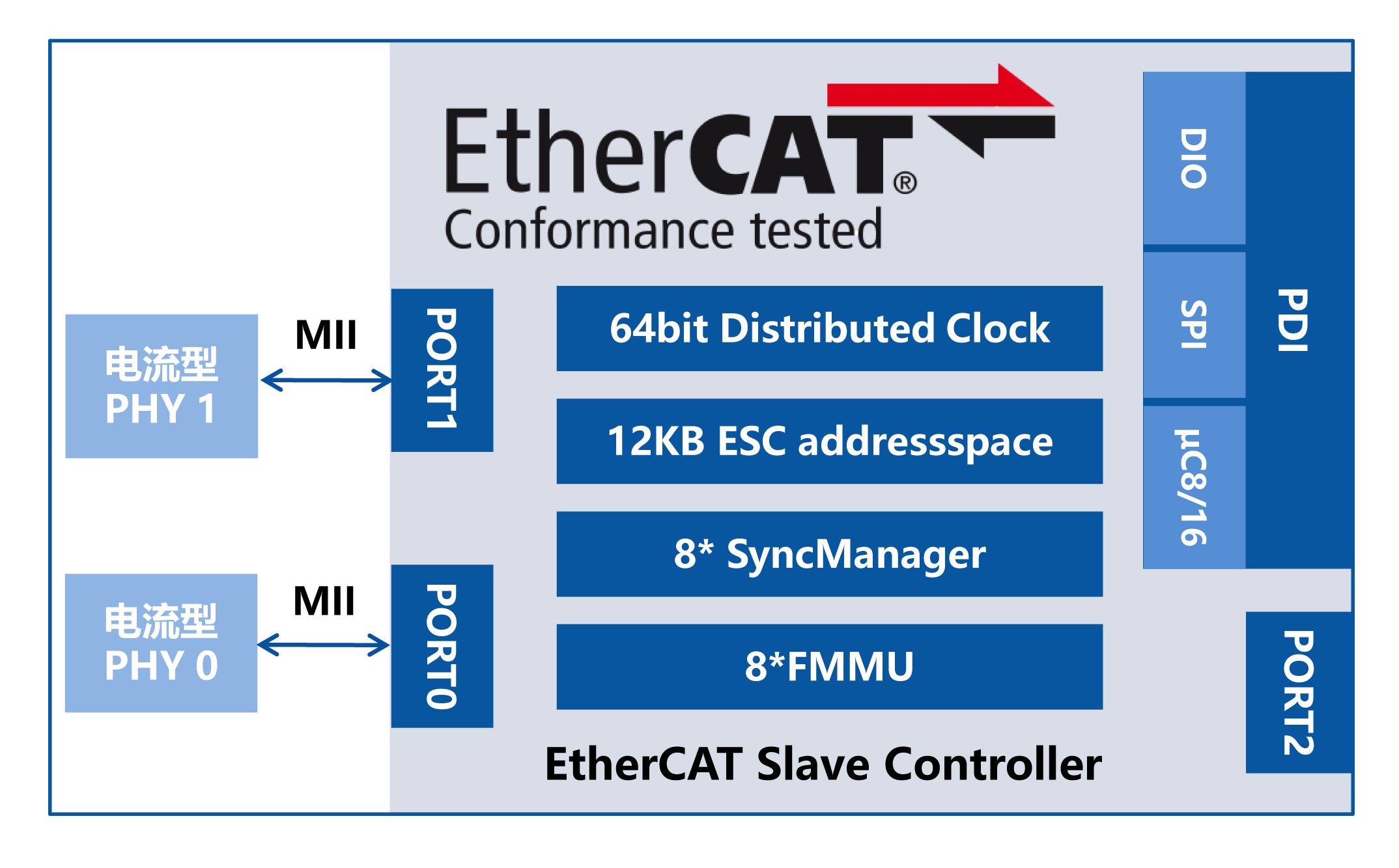
▶ CF1106系列芯片包含8个FMMU(现场总线内存管理单元) 负责实现从逻辑地址到物理地址的映射,8个SyncManager(同步管理器) 可以由用户配置方向,负责 EtherCAT 工作模式的选择和相关通信数据的访问管理,8KB的双端口存储器 (DPRAM)用于存放数据;
▶ 支持三种PDI(过程数据接口)接口:支持32位 Digital I/O、SPI 从站接口、8/16位异步微控制器接口(μC8/16),作为从站控制器和应用之间的数据接口;其中SPI与μC8/16方式用于连接外部微处理器,组成复杂EtherCAT从站;
▶ 支持64 位分布式时钟,分布时钟引脚与MCU的中断引脚连接,实现多个伺服从站控制任务与输入采样的同步;
▶ 通过I2C接口连接EEPROM存储器,存储从站设备描述信息。
▶ CF1106系列芯片内部集成2个10M/100Mbps以太网PHY,兼容IEEE 802.3u 100Base-TX、100Base-FX(仅电压型PHY支持光纤),支持Auto-Negotiation自动协商、Auto-MDIX自动交叉识别,可使用直连或交叉线缆。对于工业应用而言,CF1106系列内部集成了两个以太网PHY芯片,有利于系统高度集成,在电路设计过程中,更简洁布线更容易。
▲码灵半导体CF1106系列芯片实物图
此外,与其它EtherCAT从站控制芯片相比,CF1106系列价格更低,在后期产品成本控制上,具有更大优势,可以提高产品市场竞争力。
随着工业自动化的迅猛发展,EtherCAT伺服驱动器作为机电一体技术的关键组成部分,将标准以太网的优点和工业自动化的实时性进行有机结合,兼具高效确定性的通信协议和更强大的数据处理能力适用于对动态性和精确性要求极高的伺服驱动控制系统,降低了自动化设备成本,提高了实时响应速度,顺应了工业自动化发展趋势。码灵半导体提供富有竞争力的EtherCAT芯片助力伺服驱动控制系统向开放性、柔性、互联性、高速稳定性、可靠性、可重构性的方向发展。
欢迎联系码灵半导体李经理18759007589(微信同号)获取更多CF110x系列EtherCAT从站控制器产品信息。




 闽公网安备35020502000542号
闽公网安备35020502000542号