
码灵半导体基于EtherCAT的多轴步进电机驱动器应用方案
步进电机由于驱动简单、高效实用,常作为机床或生产线的辅助设备,在工业自动化生产中发挥着重要的作用。工业领域中多步进电机协同控制运用广泛,需要运用多步进电机控制生产高精度产品的场景也越来越多,如精密雕刻设备、汽车生产流水线以及印刷设备等。所用的电机组群多为分散且距离较远,为了能够保证设备达到预期效果,系统同步性能直接影响产品的价值。工业以太网的迅速发展加快了自动化生产线的升级,改变了驱动设备的控制和连接方式,使之朝着网络化方向发展。
由于传统步进驱动器之间的协调多用一对一的脉冲模式,该模式控制线路复杂并且自动纠错与抗干扰能力都比较弱,不能适应于条件恶劣的工业环境与自然环境。目前多步进电机协同控制主要采用RS485和CAN总线进行通信,但是存在传输速度低、传输距离短和同步误差大等问题。
在此背景下,工业以太网式多轴步进电机驱动器应运而生,可以有效地响应网络化步进驱动器件的发展需求。软硬件资源的丰富性、协议的开放性推动着工业以太网不断延伸至工业现场层。加之工业以太网对比现场总线足够高的带宽,技术的日益完善,构建基于标准协议的工业以太网的运动控制网络,形成一个自上而下相互连通,完全透明的网络系统已经成为当下全球发展的热点。
其中由德国倍福公司最初研发的一种新型工业以太网技术,EtherCAT,目前正在全球范围内迅速发展。EtherCAT网络因其适用于几乎所有的拓扑结构,数据传输的高速高效性和对于开发者简单的系统配置,在数据链路层提供独立的过程数据传输通道,明显提升的系统实时性等显著优势正在逐渐得到包括多轴步进电机驱动器在内的工业控制领域越来越多的应用。
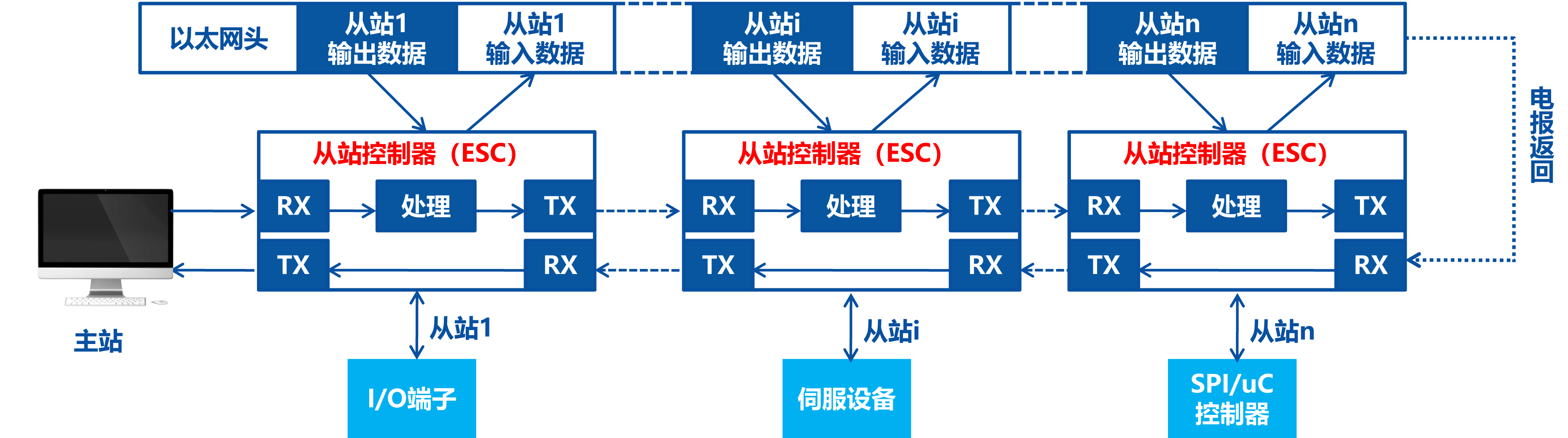
▲EtherCAT 网络工作原理图
基于码灵半导体CF1106型号ESC芯片开发的多轴步进电机驱动器应用方案将已经发展较为成熟的步进电机驱动进行集成化,实现多轴合驱,并与实时工业以太网EtherCAT相结合,以实现网络化协同控制、成本低廉、可以同时驱动多轴步进电机。通过组建基于CF1106型号ESC芯片的EtherCAT以太网络控制系统,改善了传统步进电机控制系统的不足,把传统的脉冲传送改为智能型网络数据传送并具有数据完整性校验和重发机制等纠错功能,适应了工业控制系统向分散化、网络化、智能化的发展方向。

码灵半导体EtherCAT多轴步进电机驱动器应用方案的优势特点:
▶ 方案板搭载了码灵半导体自主研发的CF1106型号ESC芯片,内部集成了2个电流型PHY,显著减少了对外部元件的依赖,从而有效降低了客户的元器件成本;
▶ 深入考虑了工业环境的苛刻要求,确保产品能在-40℃至+85℃的宽泛工作温度范围内稳定运行,完全符合标准的工业工作温度范围-40℃至+85℃;
▶ 板载超静音电机驱动,既安静又具有较低的发热量;
▶ 一体设计,体积小,节省空间,便于安装调试,集成度高,提高产品落地效率。

▲码灵半导体EtherCAT多轴步进电机驱动器方案框图
硬件选型和产品的开发效率及产品的性能密切相关,为使本方案设计的驱动器成本低、可靠性高、体积小,并且能在较短的时间内研制完成。在硬件选型中码灵半导体严格遵循以下几个原则:功能上满足要求,集成度高,提高可靠性,减少硬件软件开发的复杂程度;性价比高,在功能上满足要求的前提下,尽量采用较低价格的元器件,而且容易采购到,以保证将来批量生产时的订货;可靠性高,考虑到工业现场长期使用,需要经受恶劣环境的考验,元器件均使用工业级产品。
为此,码灵半导体借助自研的CF1106型号ESC芯片,再外加一些辅助器件即可实现对步进电机的精确控制。
采用CF1106芯片作为EtherCAT通信模块,实现电机控制指令的EtherCAT 网络传输。一方面实现了与 EtherCAT 主站之间的通信数据交互功能,既可以接收主站下发的读写本地寄存器的操作指令和输入数据,又可以将本地寄存器中存储的参数信息和输出数据上传到主站;另一方面可以根据主站下发的控制指令和过程数据实时更新本地的输入数据和输出数据。

▲码灵半导体CF1106产品结构框图
码灵半导体CF1106型号ESC芯片在EtherCAT多轴步进电机驱动器中的应用优势:
▶ Beckhoff授权ESC,满足ETG一致性要求;
▶ 内置2个电流型PHY(兼容100BASE-TX),具有抗干扰能力强、信号完整性高和稳定性好的优点;
▶ 内置8个现场总线内存管理单元(FMMU)、8个同步管理器(SM)、8KB双端口存储器 (DPRAM)和1个64位分布式时钟(DC);
▶ 多种数据接口(PDI)可选:数字I/O,SPI和8/16 位uC接口;
▶ 两种封装可选:QFN64L(9x9mm)、QFN88L(10x10mm);
▶ 满足工业温度范围:-40℃~85℃。
同时码灵半导体搭建了由脉冲信号发生器、驱动器、混合式步进电机、磁编码器、示波器和信号采集器等组成的多轴步进电机驱动器整体测试平台,对驱动器运行稳定性和运行精度等性能指标、EtherCAT通信功能进行了测试。实验测试结果显示,本驱动器能在低频下能够平稳运行,在高频时能够保持良好的输出力矩,具有较低的振动和噪声,并具备EtherCAT高实时性。本方案既发挥了步进电机的优势特点,又降低了开发成本,并可实现驱动设备互联互通,尤其适用于高实时性、高精度、多节点控制要求的领域。
目前基于码灵半导体CF1106型号ESC芯片开发的EtherCAT多轴步进电机驱动器应用方案已经在不同工程中实现,且实现都比较方便,具有较高的实际应用价值。
随着工业自动化和控制、电信、电力、测试与测量、分布式的网络传感器系统等对高精度的实时调度和控制要求越来越高,多轴步进电机控制系统在协同控制方面将发挥着至关重要的作用。基于码灵半导体CF1106型号ESC芯片开发的EtherCAT多轴步进电机驱动器参考应用方案,旨在为客户提供性能卓越、高效且易于集成的解决方案。码灵半导体步进电机实时控制技术团队提供全方位的技术支持,可助力客户快速响应市场变化,实现更多领域的创新应用。
欢迎致电18759007589或邮件咨询info@codefairsemi.com联系码灵半导体李经理,可获得码灵半导体EtherCAT多轴步进电机驱动器解决方案更多详细信息。




 闽公网安备35020502000542号
闽公网安备35020502000542号